 &imagePreview=1
&imagePreview=1
Written by Csaba Szigeti / Posted at 8/5/20
The key to success is continuous development
Therefore, we are always open to participate in research projects – because we truly believe that these not only support our cause but also assist us in creating the safer roads of the future. For this purpose, we teamed up with the Budapest University of Technology and Economics and the Mobility Platform, which is a scientific forum lead by the Hungarian Institute of Transport Sciences. In this research group the science institutes provided the research background, while AImotive supported them with its practical experience.
Scientific base of HD maps
When driving any vehicle, safety should always come first. Not surprisingly safety is also a crucial part of automated driving. It is one of, if not the most important aspect that we keep in mind throughout every step of our development cycle. Positioning – a key aspect of safety – is one of the challenges we are facing. The vehicle must know its precise location to be able to make decisions. Sensors and HD maps must complement each other to achieve a redundant input of the environment, ensuring the highest level of safety. HD maps play an important role in self-driving, still data providers are often unsure what to include in these maps. The study aims to provide an openly available recommendation set for them, based on scientific research and experience from companies developing autonomous vehicles. For this reason, we are proud to have contributed to the team’s work towards the completion of the first part of a multi-phase research project aiming to create a scientific base for HD map technology.
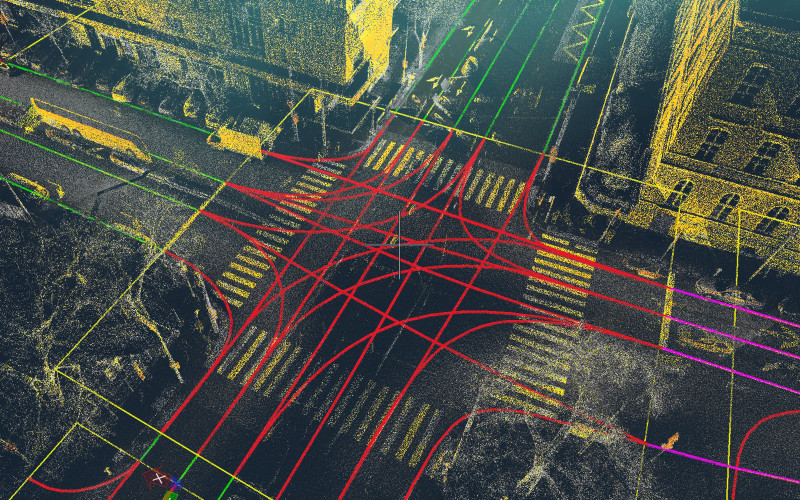
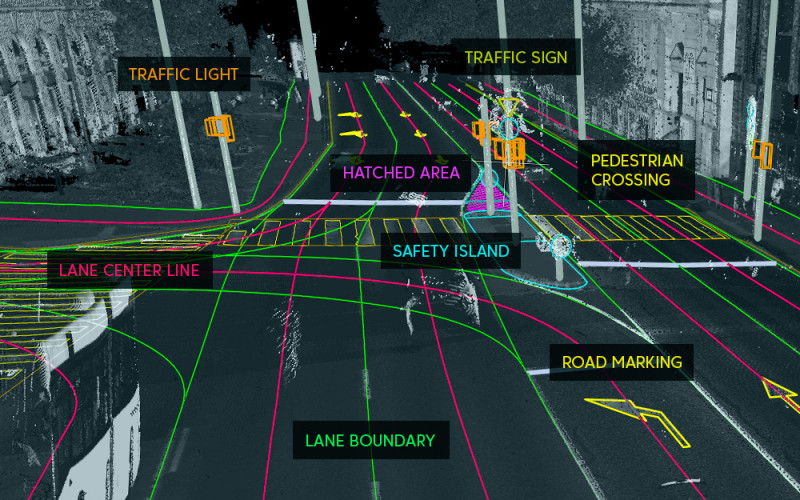
But what is an HD map? An HD (High Definition) map is a road network model that defines the attributes, structure and topology of roads, lanes, road markings, and other traffic related objects. It is a large-scale map with an absolute precision of at least 10 cm at 2σ = 95%. It should consist of a road model layer for standard navigation, a lane model layer for lane level navigation and a localization layer to help positioning. Additionally, it can store static or dynamic data that can assist driving and navigation. This data has high value in various use cases. It complements “traditional” navigation with lane level information, which is especially useful in complex urban situations such as passing through a junction. Also, traffic related objects (e.g. traffic lights, or traffic signs) can support the localization of the vehicle in dense urban areas where the GNSS signals are inaccurate, or in parking garages where there are no satellite signals at all. But HD maps don’t necessarily have to be used for driving: by auto annotating georeferenced images with them, we can speed up the creation of training datasets for our neural networks.
The focus of the first phase was to define the optimal format for HD map data for self-driving and simulation software packages. The paper is not simply a theoretical study; however, it contains introductory remarks on cartography and GIS which are the foundations of HD mapping – but it also includes practical experiences with various software types and data formats. For instance, during the research we conducted hands on tests with numerous automotive and traffic simulation softwares. The main focus was to gain a general overview of each software and to have a look at their import and export capabilities and native formats.
Additionally, the paper includes a set of requirements for an optimal data format. The requirements were created by experts from the self-driving and simulation fields. Although these fields require similar data, there were difficulties that had to be tackled to create requirements adequate for both use cases. These include the structure of a map file, the representation of different geometry types, the representation of connections between roads, topology rules of map objects, the representation of traffic rules, additional features that should be stored along with road information, storage of information about the projection and coordinate system.
Finally, the study also includes an overview of various map formats used for self-driving and simulation, such as OpenDRIVE, OpenCRG, OpenSCENARIO, KIWI and ADASIS v2, v3. Along with their introduction the paper also contains a widespread comparison. Here the key aspect was to find which format is the best suited to self-driving and simulation. To discern this, we compared the formats based on the set of requirements mentioned above. Neither of the examined formats could fulfill all requirements, although some performed better than others. The following phases of the project will include the evaluation of various data platforms, the definition of quality recommendations for map data, and the relationship between sensor data and map data among others. As a final output of the study, we plan to have an all-inclusive definition of and a list of recommendations for an optimal HD map based on scientific research.
Partnerships are the only solution
It has already become clear that no one will solve the problem of automated driving alone. The only possible way is to work with partners who have outstanding knowledge and experience in their respective fields. AImotive is also currently participating in a research project that seeks to map (pun intended) and develop the components of automated driving. That is the reason why we think that this research and its findings are an important milestone for AImotive and also for the ADAS community as a whole, because they bring the future of automated mobility one step closer.
